Recent advances in video generation enable learning robot manipulation trajectories from generated
videos. However, these approaches produce purely kinematic trajectories that lack force information,
leading to failure in contact-rich tasks where appropriate contact forces are essential for success.
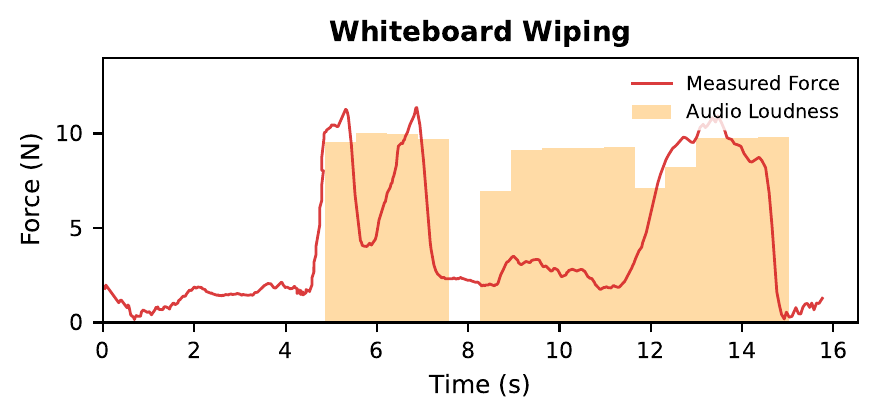
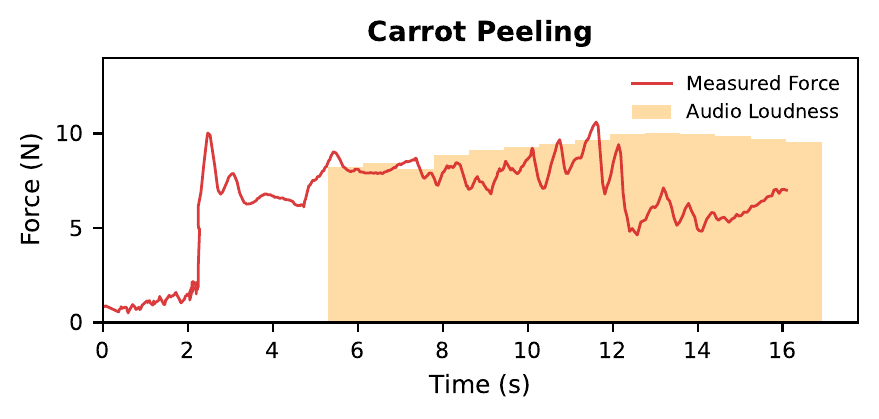
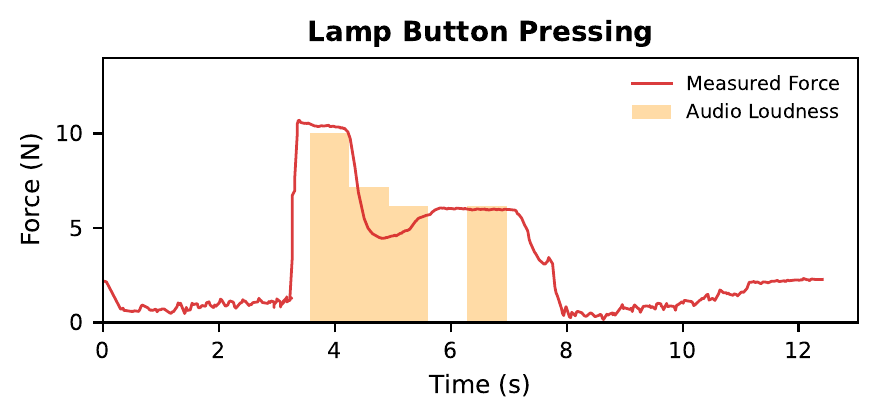
Generated audio carries a complementary and underexplored signal: contact sounds encode force dynamics
that video alone cannot capture.
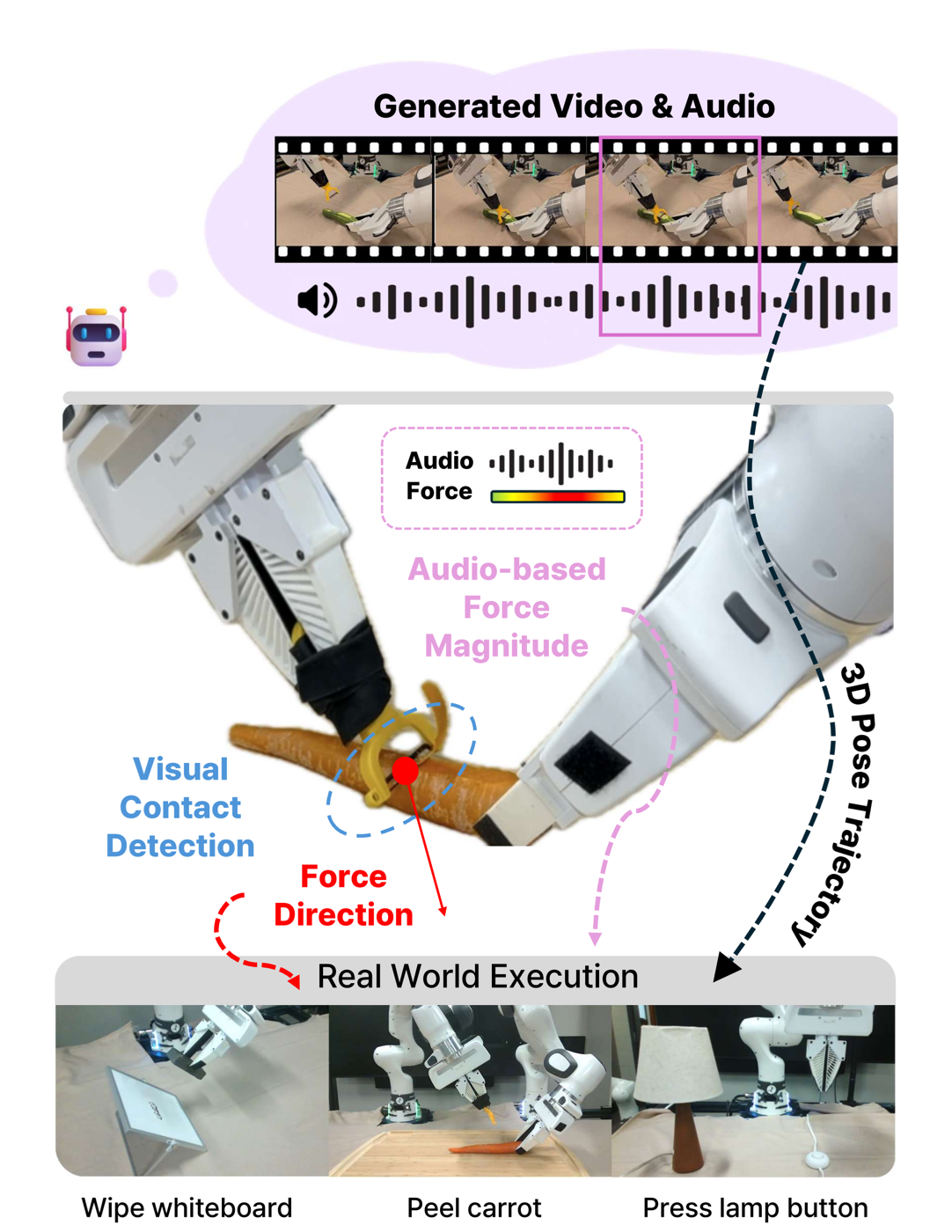
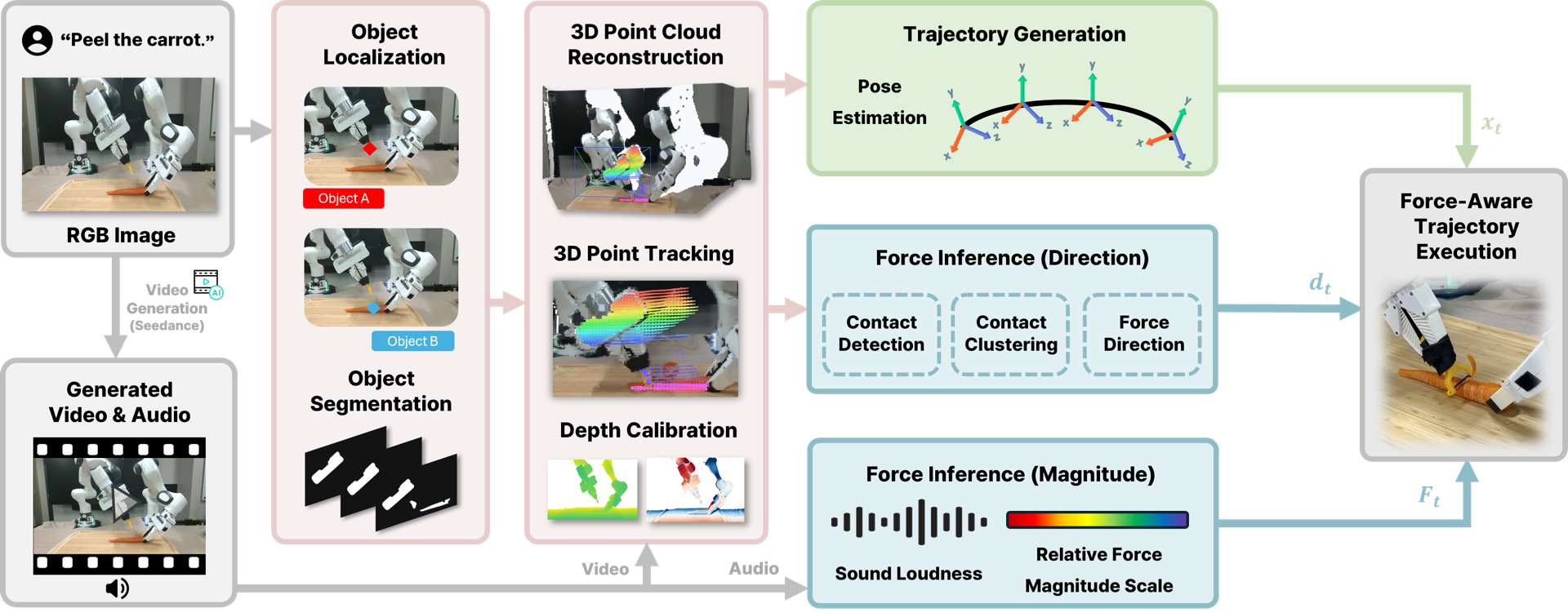
We present a pipeline that jointly leverages generated video and audio to recover both motion
trajectories and contact force profiles from a single task description. We execute these force-aware
trajectories on a Franka Panda robot using a closed-loop force regulator that tracks the audio-derived
force profile during contact. Real-robot experiments on whiteboard wiping, carrot peeling, and lamp
button pressing demonstrate that our force-aware pipeline enables successful contact-rich manipulation
from video generation where a kinematic-only baseline fails.